График работы
Кошик
USD - 41.50грнEUR - 48.7грн
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| KAWEPU02206 | 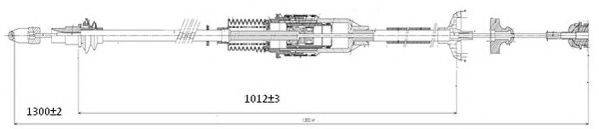 |
Трос, стоянкова гальмівна система
Тип гальма: Дисковий механізм
|
Уточнити наявність | |||||
Аналоги для KAWE PU02206 | ||||||||
| FTEFBS18049 | FTE FBS18049 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 645/506
Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| TEXTAR44036200 | TEXTAR 44036200 |
Трос, стоянкова гальмівна система
Довжина 1/довжина 2 [мм]: 645/506
Номер технічної інформації: 44000 0362 0 1 Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| JURID432418J | |
Трос, стоянкова гальмівна система
Вага, кг]: 0,18
Довжина 1 [мм]: 653 Довжина 2 [мм]: 504 Необхідна кількість: 1 Тип гальма: Диски/барабани |
Уточнити наявність | |||||
| BENDIX432418B | 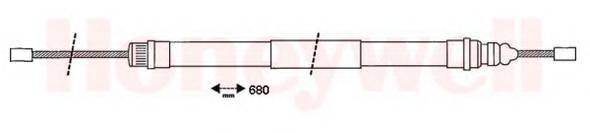 |
Трос, стоянкова гальмівна система
Довжина [мм]: 680
Необхідна кількість: 1 Сторона встановлення: ззаду праворуч Тип гальма: Барабанний механізм Тип гальма: Дисковий механізм |
Уточнити наявність | |||||
| FERODOFHB432418 | 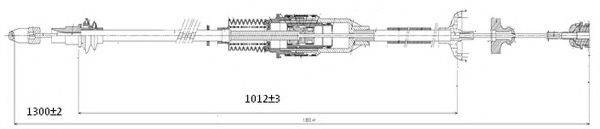 |
Трос, стоянкова гальмівна система
Вага, кг]: 0,18
Довжина 1 [мм]: 653 Довжина 2 [мм]: 504 Необхідна кількість: 1 Тип гальма: Диски/барабани |
Уточнити наявність | |||||
| A.B.S.K15598 | 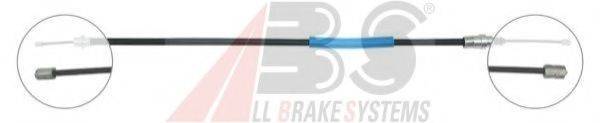 |
Трос, стоянкова гальмівна система
Вага, кг]: 0,24
Необхідна кількість: 1 Сторона встановлення: позаду Сторона встановлення: справа |
Уточнити наявність | |||||
| CABOR10.6213 |  |
Трос, стоянкова гальмівна система
Довжина 1 [мм]: 506
Довжина кабелю [мм]: 645 Сторона встановлення: ззаду праворуч |
Уточнити наявність | |||||
| PEUGEOT4745J7 | PEUGEOT 4745J7 |
Трос, стоянкова гальмівна система
Тип гальма: Дисковий механізм
|
Уточнити наявність | |||||