График работы
Кошик
USD - 41.50грнEUR - 48.7грн
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| CITROEN/PEUGEOT4066A3 | 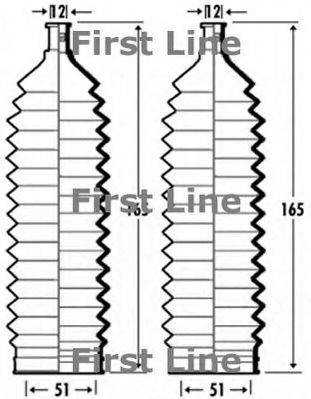 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 12
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 165 Матеріал: термопласт |
Уточнити наявність | |||||
Аналоги для CITROEN/PEUGEOT 4066A3 | ||||||||
| BORG & BECKBSG3375 | BORG & BECK BSG3375 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 12
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 165 Матеріал: термопласт |
Уточнити наявність | |||||
| FIRST LINEFSG3375 | |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 12
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 165 Матеріал: термопласт |
Уточнити наявність | |||||
| FIRST LINEFSG3419 | 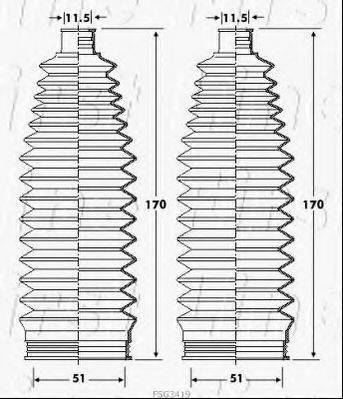 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 11,5
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 170 Матеріал: термопласт |
Уточнити наявність | |||||
| BORG & BECKBSG3419 | 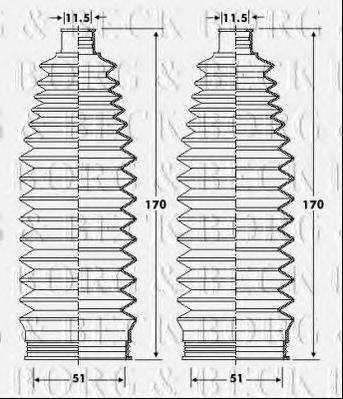 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 11,5
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 170 Матеріал: термопласт |
Уточнити наявність | |||||
| CITROEN4066A3 | CITROEN 4066A3 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 11,5
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 170 Матеріал: термопласт |
Уточнити наявність | |||||
| PEUGEOT4066A3 | PEUGEOT 4066A3 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 11,5
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 170 Матеріал: термопласт |
Уточнити наявність | |||||
| TOYOTA4553509180 | TOYOTA 4553509180 |
Пильовик, рульове управління
Внутрішній діаметр 1(мм): 11,5
Внутрішній діаметр 2 (мм): 51 Довжина [мм]: 170 Матеріал: термопласт |
Уточнити наявність | |||||